





Authors:
Eduardo Jr Piedad、Christian Ainsley Del Rosario、Eduardo Prieto-Araujo、Oriol Gomis-Bellmunt
Paper:
https://arxiv.org/abs/2408.09644
Introduction
In the realm of industrial operations, the swift and precise identification of mechanical faults is paramount for maintaining efficiency and minimizing production downtime. Traditional methods of fault detection often rely on vibration sensors, which can be costly and intrusive. However, recent advancements in artificial intelligence (AI) and deep learning (DL) have opened new avenues for non-intrusive fault diagnosis by analyzing motor phase current signals. This study delves into the application of Wavelet Transform (WT) to convert these time-series signals into time-frequency 2D representations, which are then used to train Convolutional Neural Networks (CNNs) for motor fault classification.
Related Work
AI in Motor Fault Detection
The application of AI in motor fault detection has been extensively reviewed in scholarly works [1], [2]. Innovations in this field include transforming time-series motor current signals into 2D occurrence and recurrence plots, as demonstrated in studies [3], [4], [5]. These studies developed AI models based on CNNs, achieving commendable accuracy. However, conventional machine learning (ML) techniques that apply 1D frequency-transformed datasets have shown superior performance, recording higher accuracy using the same dataset and AI model configuration [6].
Wavelet Transform in Signal Processing
Wavelet Transform is renowned for its ability to provide 2D image time-frequency representations of time-series signals, allowing for a thorough investigation of complex patterns hidden within the signals. Seminal works [7], [8] have highlighted the efficacy of wavelet-based features in enhancing the diagnostic capabilities of CNNs for detecting motor faults. More recent studies [9], [10], [11], [12] have demonstrated the robustness of integrating wavelet-based features with CNNs, leading to superior fault detection in motors.
Research Methodology
Wavelet Transform and Its Variants
Wavelet Transform (WT) is a powerful time-frequency analysis technique for signal processing. The fundamental equation for WT is expressed as follows:
[ WT{x(t)}(a,b)=\frac{1}{\sqrt{a}}\int_{-\infty}^{\infty}x(t)\psi\left(\frac{t-b}{a}\right)dt ]
Here, ( \psi(t) ) represents the mother wavelet function, ( a ) is the scale parameter, and ( b ) is the translation parameter. This formulation allows the wavelet to be dilated or contracted and shifted across the time axis, enabling the extraction of signal features at different scales and positions [14], [15].
The study explores five WT-based techniques:
– WT-Amor: Effective in analyzing sinusoidal components within signals [16].
– WT-Bump: Ideal for detecting sharp transients and anomalies in signals [17].
– WT-Morse: Suited for analyzing non-stationary signals due to its tunability and asymmetry [18].
– WSST-Amor and WSST-Bump: Utilize synchrosqueezing techniques to refine the time-frequency representation by reallocating coefficients to more accurately reflect energy concentrations in the time-frequency domain [19].
Convolutional Neural Networks (CNNs)
The CNN model architecture used in this study is illustrated in Figure 2 


Experimental Design
Motor Dataset
The dataset comprises single-phase electric current signals gathered from five 2-HP induction motors, including one normal condition and four artificially induced faults: bearing axis misalignment, stator inter-turn short circuit, broken rotor bar, and outer bearing fault. These were tested under five distinct load conditions – 0, 25, 50, 75, and 100%, resulting in a total of 3,750 signal samples. Each motor was monitored over a five-second interval at a sampling rate of 10kHz. The data was then processed into 2D time-frequency plots using wavelet transform and fed into each class’s CNN model.
Results and Analysis
Model Performance
The training and validation classification accuracy performances of the five WT models are shown in Figure 3 

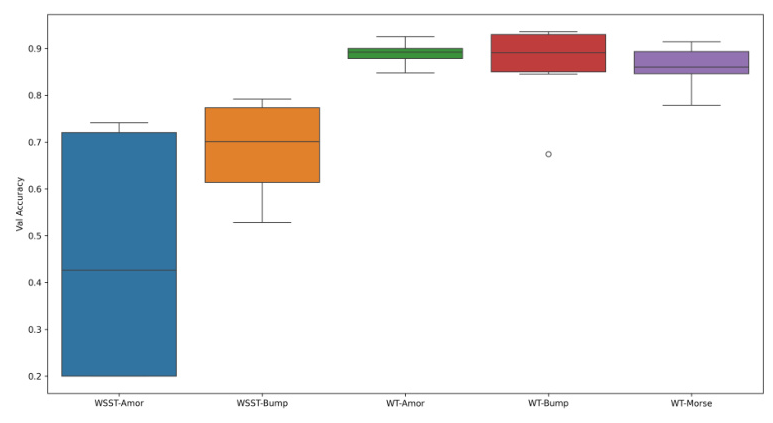
Synchrosqueezed WT Methods
The two synchrosqueezed-based WT methods (WSST-Amor and WSST-Bump) faced difficulties in accurately classifying motor faults, as evidenced by their inconsistent performance and large variations during the 10-fold stratified cross-validation stage (Figure 5) 
Comparative Analysis
Table I 
Overall Conclusion
The application of Wavelet Transform (WT) to convert time-series motor current signals into time-frequency 2D plots has effectively uncovered underlying features essential for predicting motor faults. The study tested five different WT-based transformation methods using CNNs, a deep learning architecture. The WT-Amor, WT-Bump, and WT-Morse methods demonstrated significant effectiveness, showing superior performance compared to previous 2D-image-based techniques. The WT-Morse model surpassed prior methodologies and marginally outperformed the previous best model. However, the two synchrosqueezed-WT models faced substantial inconsistencies and difficulties, suggesting that the “synchrosqueezing” process might have overly manipulated the WT plots, potentially obscuring critical patterns necessary for the deep learning of CNNs. These findings underscore the potential of wavelet-based 2D transformations for intelligent motor fault diagnosis.


